
Autonomous vehicle navigation stands at a pivotal moment of transformation. While current systems rely on time-consuming iterative processes, a groundbreaking approach called Trajectory Conditional Flow Matching (T-CFM) is challenging the status quo. This innovation promises to slash decision-making time from hundreds of milliseconds to near-instantaneous responses, fundamentally changing how robots navigate our world.
The Technical Challenge: Traditional diffusion-based trajectory planning requires approximately 200 sampling steps per trajectory, resulting in computational latency of 100-200ms. In autonomous navigation scenarios where reaction times below 50ms are critical, this computational overhead presents a significant bottleneck for system performance and safety metrics.
The State of Autonomous Navigation
Today's autonomous vehicles, like those developed by Waymo, rely heavily on diffusion models - a type of AI that gradually refines its predictions through hundreds of small steps. Think of it like an artist starting with a rough sketch and slowly adding details until the final picture emerges. This is how the current image generation models like Midjourney and Dall-E work. While this approach produces reliable results, it's computationally intensive and time-consuming.
Traditional Diffusion Models
- Requires 200+ sampling steps
- High computational overhead
- Slower real-time response
- More energy intensive
Flow Matching (T-CFM)
- Single-step trajectory generation
- 100x faster sampling speed
- Immediate decision making
- Energy efficient
Enter Flow Matching: A Paradigm Shift
Trajectory Conditional Flow Matching (T-CFM) represents a fundamental shift in how robots plan their movements. Instead of the gradual refinement approach of diffusion models, T-CFM learns a time-varying vector field - essentially a map of all possible movements at once. This allows robots to generate high-quality trajectories in a single step, rather than hundreds of iterative steps.
The breakthrough: T-CFM achieves up to 100 times faster sampling speeds compared to diffusion models, without sacrificing accuracy. This means autonomous vehicles can react almost instantaneously to changing conditions.
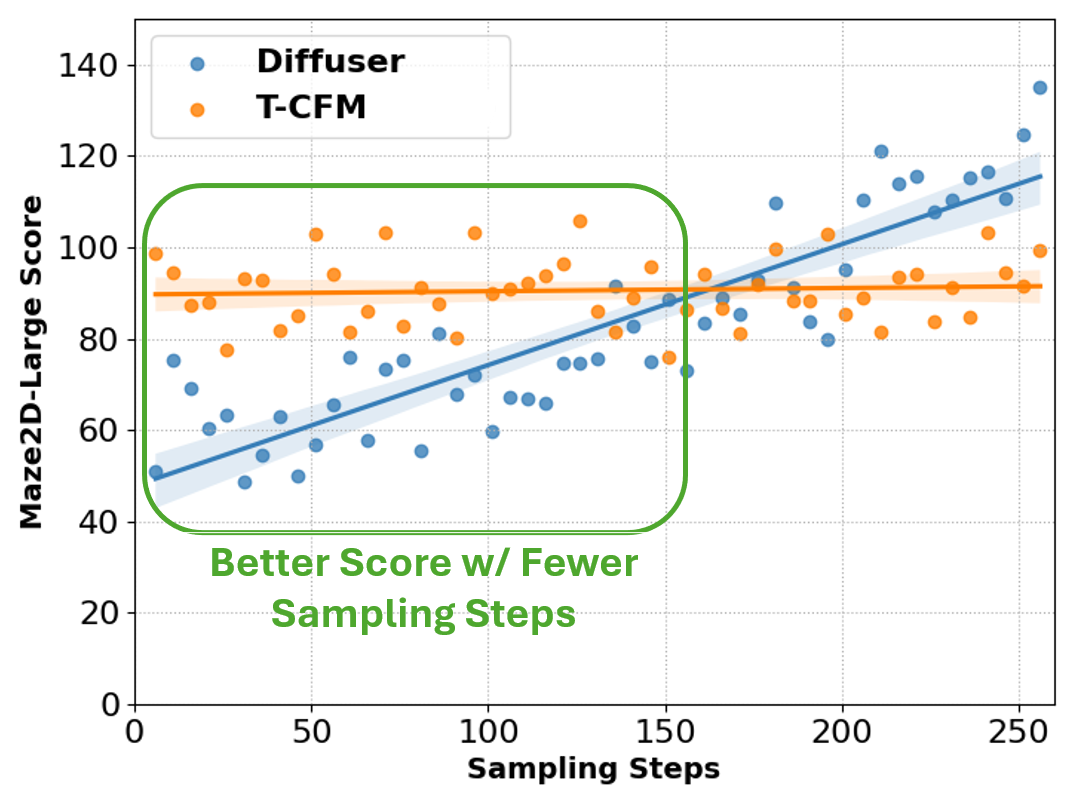
Performance comparison: T-CFM vs Traditional Diffusion Models from https://arxiv.org/html/2403.10809v1
Real-World Applications & Safety Implications
- Enhanced Urban Navigation - Autonomous vehicles that respond instantly to complex city environments, with reaction times approaching human reflexes
- Multi-Agent Coordination - Better prediction and coordination between multiple autonomous systems, reducing collision risks
- Energy Optimization - Reduced computational overhead leading to significant power savings
- Safety Improvements - Faster reaction times in critical situations, allowing vehicles to respond to sudden obstacles or changes in their environment
Looking Ahead: A Comprehensive Safety Approach
The revolutionary speed of T-CFM's decision-making capabilities opens new possibilities for comprehensive safety systems. While the algorithm handles split-second decisions, it can integrate with broader safety infrastructure including:
- Advanced sensor networks for environmental awareness
- Vehicle-to-vehicle communication systems
- Smart traffic management systems
- Could we create "orbital safety net"? - blog on this coming soon
Unconventional Horizons
While T-CFM represents a leap in navigation technology, it's just the beginning. Imagine autonomous vehicles that don't just avoid obstacles, but predict and choreograph complex multi-vehicle maneuvers like a synchronized dance. Picture robots that learn from each other's experiences in real-time, creating a collective intelligence that grows exponentially with each interaction.
The next frontier might not be on our roads at all - consider autonomous construction machines operating in integrated space-time, plotting work sequences that bend our traditional understanding of site coordination and build processes. These aren't just smarter excavators or cranes; they're revolutionary systems that could reshape our entire approach to construction orchestration. Instead of seeing a building site as a series of separate spatial zones and temporal phases, these machines perceive and operate within a unified four-dimensional construction manifold. A concrete pump doesn't just move through space - it coordinates its position and timing relative to concrete trucks, formwork installation, and curing schedules. An autonomous crane doesn't simply swing through three dimensions - it looks more like a robotic arm that weaves through a spacetime fabric of scheduled lifts, staged materials, and evolving structural geometries.